Learning to Imitate Human Demonstrations via CycleGAN

This work presents AVID, a method that allows a robot to learn a task, such as
making coffee, directly by watching a human perform the task.
One of the most important markers of intelligence is the ability to learn by
watching others. Humans are particularly good at this, often being able to
learn tasks by observing other humans. This is possible because we are not
simply copying the actions that other humans take. Rather, we first imagine
ourselves performing the task, and this provides a starting point for further
practicing the task in the real world.
Robots are not yet adept at learning by watching humans or other robots. Prior
methods for imitation learning, where robots learn from demonstrations of the
task, typically assume that the demonstrations can be given directly through
the robot, using techniques such as kinesthetic
teaching or
teleoperation. This assumption limits
the applicability of robots in the real world, where robots may be frequently
asked to learn new tasks quickly and without programmers, trained roboticists,
or specialized hardware setups. Can we instead have robots learn directly from
a video of a human demonstration?
This work presents AVID, a method
that enables robotic imitation learning from human videos through a strategy,
similar to humans, of imagination and practice. Given human demonstration
videos, AVID first translates these demonstrations into videos of the robot
performing the task, by means of image-to-image translation. In order to
translate human videos to robot videos directly at the pixel level, we use
CycleGAN, a recently proposed model that
can learn image-to-image translation between two domains using unpaired images
from each domain.
To handle complex, multi-stage tasks, we extract instruction images from
these translated robot demonstrations, which depict key stages of the task.
These instructions then define a reward function for a model-based
reinforcement learning (RL) procedure that allows the robot to practice the
task in order to learn its execution.
The main goal of AVID is to minimize the human burden associated with defining
the task and supervising the robot. Providing rewards via human videos handles
the task definition, however there is still human cost during the actual
learning process. AVID addresses this by having the robot learn to reset each
stage of the task on its own, in order to be able to practice multiple times
without requiring manual intervention. Thus, the only human involvement
required at robot learning time is in the form of key presses and a few manual
resets. We demonstrate that this approach is capable of solving complex,
long-horizon tasks with minimal human involvement, removing most of the human
burden associated with instrumenting the task setup, manually resetting the
environment, and supervising the learning process.
Automated Visual Instruction-Following with Demonstrations

Our method, AVID, translates human instruction images into the corresponding
robot instruction images via CycleGAN and uses model-based RL to learn how to
complete each instruction.
We name our approach automated visual instruction-following with
demonstrations, or AVID. AVID relies on several key ideas in image-to-image
translation and model-based RL, and here we will discuss each of these
components.
Translating Human Videos to Robot Videos

Left: CycleGAN has been successful for tasks such as translating from videos of
horses to videos of zebras. Right: We apply CycleGAN to the task of translating
from human demonstration videos to robot demonstration videos.
CycleGAN has previously been shown to be effective on a number of domains, such
as frame-by-frame translation of videos of horses into
zebras. Thus, we train a CycleGAN
where the domains are human and robot images: for training data, we collect
demonstrations from the human and random movements from both the human and
robot. Through this, we obtain a CycleGAN that is capable of generating fake
robot demonstrations from human demonstrations, as depicted above.
Though the robot demonstration is visually realistic for the most part, the
translated video will inevitably exhibit artifacts, such as the coffee cup
warping and the robot gripper being displaced from the arm. This makes learning
from the full video ineffective, and so we devise an alternate strategy that
does not rely on the full video. Specifically, we extract instruction images
from the translated video that depict key stages of the task – for example,
for the coffee making task shown above, the instructions consist of grasping
the cup, placing the cup in the coffee machine, and pushing the button on top
of the machine. By only using specific images rather than the entire video, the
learning process is less affected by imperfect translated demonstrations.
Accomplishing Instructions through Planning
The instructions images that we extract from the demonstration split up the
overall task into stages, and AVID uses a model-based planning
algorithm to
try and complete each stage of the task. Specifically, using the robot data we
collect for CycleGAN training along with the translated instructions, we learn
a dynamics model along with a set of instruction classifiers that predict
when each instruction has been successfully accomplished. When attempting stage
$s$, the algorithm samples actions, predicts the resulting states using the
dynamics model, and then selects the action that is predicted by the classifier
for stage $s$ to have the highest chance of success. This algorithm repeatedly
selects actions for a specified number of time steps or until the classifier
signals success, i.e., the robot believes that it has completed the current
stage.

We use a structured latent variable model, similar to the SLAC model, to learn
a state representation based on image observations and robot actions.
Prior
work has shown that training a
structured latent variable model is an effective strategy for learning tasks
in image-based domains. At a high level, we want our robot to extract a state
representation from its visual input that is low-dimensional and simpler to
learn from than directly learning from image pixels. This is accomplished using
a model similar to the SLAC model, which
introduces a latent state, decomposed into two parts, that evolve according to
the learned dynamics model and give rise to the robot images according to a
learned neural network decoder. When presented with an image observation, the
robot can then encode the image, with another neural network, into a latent
state and operate at the level of states rather than pixels.
Instruction-Following via Model-Based Reinforcement Learning
AVID uses model-based planning to accomplish instructions, querying the human
when the classifier signals success and automatically resetting when the
instruction is not achieved.
When attempting stage $s$, the planning algorithm will continue selecting
actions for a maximum number of time steps or until the classifier for stage
$s$ signals success. In the latter case, the robot stops and queries the human,
who indicates via a key press whether or not the robot has actually succeeded.
If the human indicates success, the robot moves on to stage $s+1$. However, if
the human indicates failure, then the robot will switch to planning with the
classifier from the previous stage, i.e., stage $s-1$. In this way, the robot
automatically attempts to reset to the beginning of stage $s$ in order to
position itself to try the stage again. This entire procedure ends when the
human indicates success for the final stage, at which point the robot has
completed the entire task.
By having the robot automatically attempt to reset itself, we reduce the human
burden in having to manually reset the environment, as this is only required
when there are problems such as the cup falling over. For the most part, the
human is only required to provide key presses during the training process,
which is much simpler and less intensive than manual intervention. Furthermore,
the stage-wise resetting and retrying allows the robot to practice difficult
stages of the task, which focuses the learning process and robustifies the
robot’s behavior. As shown in the next section, AVID is capable of solving
complicated multi-stage tasks on a real Sawyer robot arm directly from human
demonstration videos and minimal human supervision.
Experiments
We demonstrate that AVID is able to learn multi-stage tasks, including
operating a coffee machine and retrieving a cup from a drawer, on a real Sawyer
robotic arm.
We ran our experiments on a Sawyer robotic arm, a seven degree of freedom
manipulator that we tasked with operating a coffee machine and retrieving a cup
from a closed drawer, as depicted above. On both tasks, we compared to
time-contrastive networks (TCN), a prior
method that also can learn robot skills from human demonstrations. We also
ablated our method to learn from full demonstrations, which we refer to as the
“imitation ablation”, and to operate directly at the pixel level, which we term
the “pixel-space ablation”. Finally, in the setting where we have access to
demonstrations given directly through the robot, which is an assumption made in
most prior work in imitation learning, we compared to behavioral cloning from
observations (BCO) and a standard behavioral
cloning approach. For additional details about the experiments, such as
hyperparameters and data collection, please refer to the
paper.
Task Setup
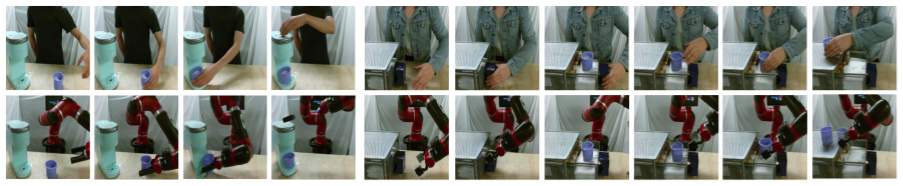
Instruction images given by the human (top) and translated into the robot’s
domain (bottom) for the coffee making (left) and cup retrieval (right) tasks.
We specified three stages for the coffee making task as depicted above.
Starting from the initial state on the left, the instructions were to pick up
the cup, place the cup in the machine, and press the button on top of the
machine. We used a total of 30 human demonstrations for this task, amounting to
about 20 minutes of human time. Cup retrieval is a more complicated task, and
we specified five stages here. From the initial state, the instructions were to
grasp the drawer handle, open the drawer, move the arm up and out of the way,
grasp the cup, and place the cup on top of the drawer. The middle stage of
moving the arm was important so that the robot did not hit the handle and
accidentally close the drawer, and this highlights an additional benefit of
AVID, as specifying this additional instruction was as simple as segmenting out
another time step within the human videos. For cup retrieval, we used 20 human
demonstrations, again amounting to about 20 minutes of human time.
Results
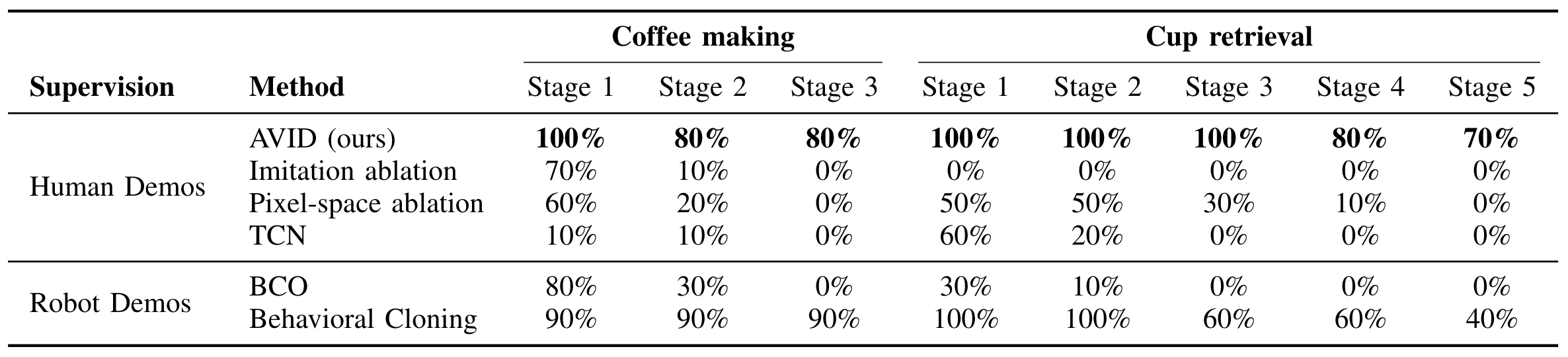
AVID significantly outperforms ablations and prior methods that use human
demonstrations on the tasks we consider. AVID is also competitive with, and
sometimes even outperforms, baseline methods that use real demonstrations given
on the robot itself.
The table and video above summarize the results of running AVID and the
comparisons on the coffee making and cup retrieval tasks. AVID exhibits strong
performance and successfully completes all stages of both tasks most of the
time, with essentially perfect performance in the beginning stages. As the
video shows, AVID constantly makes use of automated resetting and retrying
during both training and the final evaluation, and failures typically
correspond to small, but significant, errors such as knocking the cup over.
AVID also performs significantly better than either the imitation or
pixel-space ablations, demonstrating the advantages obtained through stage-wise
training and learning a latent variable model. Finally, TCN can learn the
earlier stages of cup retrieval but is generally unsuccessful otherwise.
We also evaluate two methods that assume access to real robot demonstrations,
which AVID does not require. First, BCO uses only the image observations from
the demonstrations, and the performance of this method falls off sharply for
the later stages of each task. This highlights the difficulty of learning
temporally extended tasks directly from the full demonstrations. Finally, we
compare to behavioral cloning, which uses both the robot observations and
actions, and we note that this method is the strongest baseline as it uses the
most privileged information out of all the comparisons. However, we find that
AVID still outperforms behavioral cloning for cup retrieval, and this is most
likely due to the explicit stage-wise training that AVID employs.
Related Work
As mentioned above, most prior work on imitation
learning
has assumed that demonstrations can be given directly on the robot, rather than
learning directly from human videos. However, learning from humans videos has
also been studied, through various methods such as
pose and
object
detection,
predictive
modeling,
context
translation, learning
reward
representations, and
meta-learning. The key
differences between these methods and AVID is that AVID directly translates
human demonstration videos at the pixel level in order to explicitly handle the
change in embodiment.
Furthermore, we evaluate on complex multi-stage tasks, and AVID’s ability to
solve these tasks is enabled in part by the incorporation of explicit
stage-wise training, where resets are learned for each stage. Prior work in RL
has also investigated
learning
resets, similarly demonstrating that doing
so allows for learning multi-stage tasks and reduces human burden and the need
for manual resets. AVID combines ideas in reset learning, image-to-image
translation, and model-based RL in order to learn temporally extended tasks
directly from image observations in the real world, using only a modest number
of human demonstrations.
Future Work
The most exciting direction for future work is to extend the capabilities of
the general CycleGAN in order to enable efficient learning of a wide array of
tasks given only a few human videos of the task. Imagine a CycleGAN that is
trained on a large dataset of kitchen interactions, consisting of a coffee
machine, multiple drawers, and numerous other objects. If the CycleGAN is able
to reliably translate human demonstrations involving any of these objects, then
this opens up the possibility of a general-purpose kitchen robot that can
quickly pick up any task simply through observation and a small amount of
practice. Pursuing this line of research is a promising avenue for enabling
capable and useful robots that can truly learn by watching humans.
This post is based on the following paper:
- Laura Smith, Nikita Dhawan, Marvin Zhang, Pieter Abbeel, Sergey Levine.
AVID : Learning Multi-Stage Tasks via Pixel-Level Translation of Human Videos
Project webpage
We would like to thank Sergey Levine for providing feedback on this post.