Scaling Multi-Agent Reinforcement Learning
An earlier version of this post is on the RISELab blog. It is posted here
with the permission of the authors.
We just rolled out general support for multi-agent reinforcement learning in
Ray RLlib 0.6.0. This blog post is a brief tutorial on multi-agent RL and
how we designed for it in RLlib. Our goal is to enable multi-agent RL across a
range of use cases, from leveraging existing single-agent algorithms to training
with custom algorithms at large scale.
Why multi-agent reinforcement learning?
We’ve observed that in applied RL settings, the question of whether it makes
sense to use multi-agent algorithms often comes up. Compared to training a
single policy that issues all actions in the environment, multi-agent approaches
can offer:
-
A more natural decomposition of the problem. For example, suppose one
wants to train policies for cellular antenna tilt control in urban
environments. Instead of training a single “super-agent” that controls all the
cellular antennas in a city, it is more natural to model each antenna as a
separate agent in the environment because only neighboring antennas and user
observations are relevant to each site. In general, we may wish to have each
agent’s action and/or observation space restricted to only model the
components that it can affect and those that affect it. -
Potential for more scalable learning. First, decomposing the actions and
observations of a single monolithic agent into multiple simpler agents not
only reduces the dimensionality of agent inputs and outputs, but also
effectively increases the amount of training data generated per step of the
environment.Second, partitioning the action and observation spaces per agent can play a
similar role to the approach of imposing temporal abstractions, which has
been successful in increasing learning efficiency in the single-agent
setting. Relatedly, some of these hierarchical approaches can be
implemented explicitly as multi-agent systems.Finally, good decompositions can also lead to the learning of policies that
are more transferable across different variations of an environment,
i.e., in contrast to a single super-agent that may over-fit to a particular
environment.
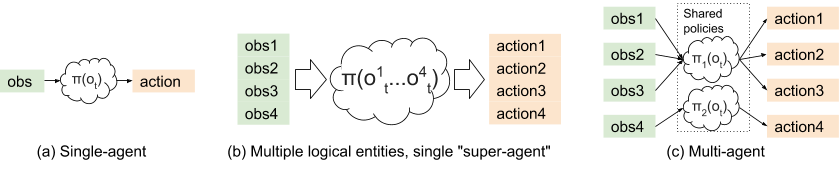
Figure 1: Single-agent approaches (a) and (b) in comparison with
multi-agent RL (c).
Some examples of multi-agent applications include:
Traffic congestion reduction: It turns out that by intelligently
controlling the speed of a few autonomous vehicles we can drastically
increase the traffic flow. Multi-agent can be a requirement here, since in
mixed-autonomy settings, it is unrealistic to model traffic lights and
vehicles as a single agent, which would involve the synchronization of
observations and actions across all agents in a wide area.
Flow simulation, without AVs and then with AV agents (red vehicles):
Antenna tilt control: The joint configuration of cellular base stations
can be optimized according to the distribution of usage and topology of the
local environment. Each base station can be modeled as one of multiple agents
covering a city.

OpenAI Five: Dota 2 AI agents are trained to coordinate with each other to
compete against humans. Each of the five AI players is implemented as a separate
neural network policy and trained together with large-scale PPO.

Introducing multi-agent support in RLlib
In this blog post we introduce general purpose support for multi-agent RL in
RLlib, including compatibility with most of RLlib’s distributed
algorithms: A2C / A3C, PPO, IMPALA, DQN, DDPG, and Ape-X. In the remainder
of this blog post we discuss the challenges of multi-agent RL, show how to train
multi-agent policies with these existing algorithms, and also how to implement
specialized algorithms that can deal with the non-stationarity and increased
variance of multi-agent environments.
There are currently few libraries for multi-agent RL, which increases the
initial overhead of experimenting with multi-agent approaches. Our goal is to
reduce this friction and make it easy to go from single-agent to multi-agent RL
in both research and application.
Why supporting multi-agent is hard
Building software for a rapidly developing field such as RL is challenging,
multi-agent especially so. This is in part due to the breadth of techniques used
to deal with the core issues that arise in multi-agent learning.
Consider one such issue: environment non-stationarity. In the below figure,
the red agent’s goal is to learn how to regulate the speed of the traffic. The
blue agents are also learning, but only to greedily minimize their own travel
time. The red agent may initially achieve its goal by simply driving at the
desired speed. However, in a multi-agent environment, the other agents will
learn over time to meet their own goals – in this case, bypassing the red
agent. This is problematic since from a single-agent view (i.e., that of the red
agent), the blue agents are “part of the environment”. The fact that environment
dynamics are changing from the perspective of a single agent violates the Markov
assumptions required for the convergence of Q-learning algorithms such as
DQN.

Figure 2: Non-stationarity of environment: Initially (a), the red agent
learns to regulate the speed of the traffic by slowing down. However, over time
the blue agents learn to bypass the red agent (b), rendering the previous
experiences of the red agent invalid.
A number of algorithms have been proposed that help address this issue, e.g.,
LOLA, RIAL, and Q-MIX. At a high level, these algorithms take
into account the actions of the other agents during RL training, usually by
being partially centralized for training, but decentralized during execution.
Implementation wise, this means that the policy networks may have dependencies
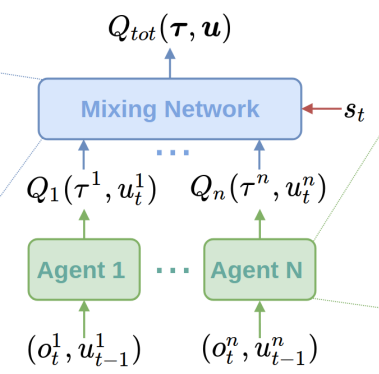
on each other, i.e., through a mixing network in Q-MIX:
Figure 3: The Q-mix network architecture, from QMIX: Monotonic Value Function
Factorisation for Deep Multi-Agent Reinforcement Learning. Individual
Q-estimates are aggregated by a monotonic mixing network for efficiency of final
action computation.
Similarly, policy-gradient algorithms like A3C and PPO may struggle in
multi-agent settings, as the credit assignment problem becomes increasingly
harder with more agents. Consider a traffic gridlock between many autonomous
agents. It is easy to see that the reward given to an agent – here reflecting
that traffic speed has dropped to zero – will have less and less correlation
with the agent’s actions as the number of agents increases:
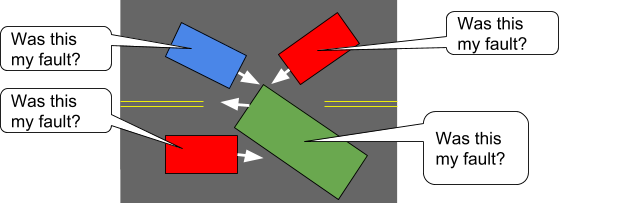
Figure 4: High variance of advantage estimates: In this traffic gridlock
situation, it is unclear which agents’ actions contributed most to the problem
— and when the gridlock is resolved, from any global reward it will be unclear
which agents get credit.
One class of approaches here is to model the effect of other agents on the
environment with centralized value functions (the “Q” boxes in Figure 5)
function, as done in MA-DDPG. Intuitively, the variability of individual
agent advantage estimates can be greatly reduced by taking into account the
actions of other agents:
Figure 5: The MA-DDPG architecture, from Multi-Agent Actor-Critic for Mixed
Cooperative-Competitive Environments. Policies run using only local
information at execution time, but may take advantage of global information at
training time.

So far we’ve seen two different challenges and approaches for tackling
multi-agent RL. That said, in many settings training multi-agent policies
using single-agent RL algorithms can yield surprisingly strong results. For
example, OpenAI Five has been successful using only a combination of large-scale
PPO and a specialized network model. The only considerations for
multi-agent are the annealing of a “team spirit” hyperparameter that influences
the level of shared reward, and a shared “max-pool across Players” operation in
the model to share observational information.
Multi-agent training in RLlib
So how can we handle both these specialized algorithms and also the standard
single-agent RL algorithms in multi-agent settings? Fortunately RLlib’s
design makes this fairly simple. The relevant principles to multi-agent
are as follows:
-
Policies are represented as objects: All gradient-based algorithms in
RLlib declare a policy graph object, which includes a policy model
$pi_theta(o_t)$, a trajectory postprocessing function
$post_theta(traj)$,
and finally a policy loss $L(theta; X)$. This policy graph object
specifies enough for the distributed framework to execute environment rollouts
(by querying $pi_theta$), collate experiences (by applying
$post_theta$), and finally to improve the policy (by descending
$L(theta; X)$). -
Policy objects are black boxes: To support multi-agent, RLlib just needs
to manage the creation and execution of multiple policy graphs per
environment, and add together the losses during policy optimization.
Policy graph objects are treated largely as black boxes by RLlib, which means
that they can be implemented in any framework including TensorFlow and
PyTorch. Moreover, policy graphs can internally share variables and layers
to implement specialized algorithms such as Q-MIX and MA-DDPG, without special
framework support.
To make the application of these principles concrete, In the next few sections
we walk through code examples of using RLlib’s multi-agent APIs to execute
multi-agent training at scale.
Multi-agent environment model
We are not aware of a standard multi-agent environment interface, so we wrote
our own as a straightforward extension of the gym interface. In a
multi-agent environment, there can be multiple acting entities per step. As a
motivating example, consider a traffic control scenario (Figure 6) where
multiple controllable entities (e.g., traffic lights, autonomous vehicles) work
together to reduce highway congestion.
In this scenario,
- Each of these agents can act at different time-scales (i.e., act
asynchronously). - Agents can come and go from the environment as time progresses.
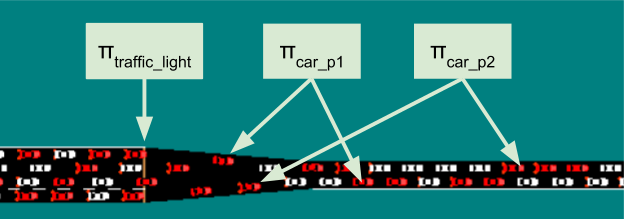
Figure 6. RLlib multi-agent environments can model multiple independent
agents that come and go over time. Different policies can be assigned to agents
as they appear.
This is formalized in the MultiAgentEnv interface, which can returns
observations and rewards from multiple ready agents per step:
# Example: using a multi-agent env
> env = MultiAgentTrafficEnv(num_cars=20, num_traffic_lights=5)
# Observations are a dict mapping agent names to their obs. Not all
# agents need to be present in the dict in each time step.
> print(env.reset())
{
"car_1": [[...]],
"car_2": [[...]],
"traffic_light_1": [[...]],
}
# Actions should be provided for each agent that returned an observation.
> new_obs, rewards, dones, infos = env.step(
actions={"car_1": ..., "car_2": ...})
# Similarly, new_obs, rewards, dones, infos, etc. also become dicts
> print(rewards)
{"car_1": 3, "car_2": -1, "traffic_light_1": 0}
# Individual agents can early exit; env is done when "__all__" = True
> print(dones)
{"car_2": True, "__all__": False}
Any Discrete, Box, Dict, or Tuple observation space from OpenAI gym can be
used for these individual agents, allowing for multiple sensory inputs per
agent (including communication between agents, it desired).
Multiple levels of API support
At a high level, RLlib models agents and policies as objects that may be bound
to each other for the duration of an episode (Figure 7). Users can leverage this
abstraction to varying degrees, from just using a single-agent shared policy, to
multiple policies, to fully customized policy optimization:
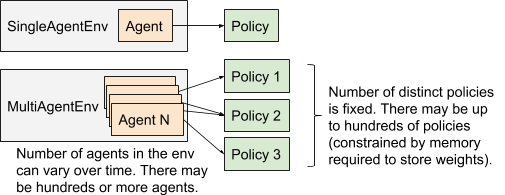
Figure 7: The multi-agent execution model in RLlib compared with
single-agent execution.
Level 1: Multiple agents, shared policy
If all “agents” in the env are homogeneous (e.g., multiple independent cars in a
traffic simulation), then it is possible to use existing single-agent algorithms
for training. Since there is still only a single policy being trained, RLlib
only needs to internally aggregate the experiences of the different agents prior
to policy optimization. The change is minimal on the user side:
from single-agent:
register_env("your_env", lambda c: YourEnv(...))
trainer = PPOAgent(env="your_env")
while True:
print(trainer.train()) # distributed training step
to multi-agent:
register_env("your_multi_env", lambda c: YourMultiEnv(...))
trainer = PPOAgent(env="your_multi_env")
while True:
print(trainer.train()) # distributed training step
Note that the PPO “Agent” here is a just a naming convention carried over from
the single-agent API. It acts more as a “trainer” of agents than an actual
agent.
Level 2: Multiple agents, multiple policies
To handle multiple policies, this requires the definition of which agent(s) are
handled by each policy. We handle this in RLlib via a policy mapping function,
which assigns agents in the env to a particular policy when the agent first
enters the environment. In the following examples we consider a hierarchical
control setting where supervisor agents assign work to teams of worker agents
they oversee. The desired configuration is to have a single supervisor policy
and an ensemble of two worker policies:
def policy_mapper(agent_id):
if agent_id.startswith("supervisor_"):
return "supervisor_policy"
else:
return random.choice(["worker_p1", "worker_p2"])
In the example, we always bind supervisor agents to the single supervisor
policy, and randomly divide other agents between an ensemble of two different
worker policies. These assignments are done when the agent first enters the
episode, and persist for the duration of the episode. Finally, we need to define
the policy configurations, now that there is more than one. This is done as part
of the top-level agent configuration:
trainer = PPOAgent(env="control_env", config={
"multiagent": {
"policy_mapping_fn": policy_mapper,
"policy_graphs": {
"supervisor_policy":
(PPOPolicyGraph, sup_obs_space, sup_act_space, sup_conf),
"worker_p1": (
(PPOPolicyGraph, work_obs_s, work_act_s, work_p1_conf),
"worker_p2":
(PPOPolicyGraph, work_obs_s, work_act_s, work_p2_conf),
},
"policies_to_train": [
"supervisor_policy", "worker_p1", "worker_p2"],
},
})
while True:
print(trainer.train()) # distributed training step
This would generate a configuration similar to that shown in Figure 2. You can
pass in a custom policy graph class for each policy, as well as different policy
config dicts. This allows for any of RLlib’s support for customization (e.g.,
custom models and preprocessors) to be used per policy, as well as
wholesale definition of a new class of policy.
Advanced examples:
Level 3: Custom training strategies
For advanced applications or research use cases, it is inevitable to run into
the limitations of any framework.
For example, let’s suppose multiple training methods are desired: some agents
will learn with PPO, and others with DQN. This can be done in a way by swapping
weights between two different trainers (there is a code example here), but
this approach won’t scale with even more types of algorithms thrown in, or if
e.g., you want to use experiences to train a model of the environment at the
same time.
In these cases we can fall back to RLlib’s underlying system Ray to
distribute computations as needed. Ray provides two simple parallel primitives:
- Tasks, which are Python functions executed asynchronously via
func.remote() - Actors, which are Python classes created in the cluster via
class.remote(). Actor methods can be called via
actor.method.remote().
RLlib builds on top of Ray tasks and actors to provide a toolkit for distributed
RL training. This includes:
- Policy graphs (as seen in previous examples)
- Policy evaluation: the PolicyEvaluator class manages the environment
interaction loop that generates batches of experiences. When created as
Ray actors, it can be used to gather experiences in a distributed way. - Policy optimization: these implement distributed strategies for
improving policies. You can use one of the existing optimizers or go with a
custom strategy.
For example, you can create policy evaluators to gather multi-agent
rollouts, and then process the batches as needed to improve the policies:
# Initialize a single-node Ray cluster
ray.init()
# Create local instances of your custom policy graphs
sup, w1, w2 = SupervisorPolicy(), WorkerPolicy(), WorkerPolicy()
# Create policy evaluators (Ray actor processes running in the cluster)
evaluators = []
for i in range(16):
ev = PolicyEvaluator.as_remote().remote(
env_creator=lambda ctx: ControlEnv(),
policy_graph={
"supervisor_policy": (SupervisorPolicy, ...),
"worker_p1": ..., ...},
policy_mapping_fn=policy_mapper,
sample_batch_size=500)
evaluators.append(ev)
while True:
# Collect experiences in parallel using the policy evaluators
futures = [ev.sample.remote() for ev in evaluators]
batch = MultiAgentBatch.concat_samples(ray.get(futures))
# >>> print(batch)
# MultiAgentBatch({
# "supervisor_policy": SampleBatch({
# "obs": [[...], ...], "rewards": [0, ...], ...
# }),
# "worker_p1": SampleBatch(...),
# "worker_p2": SampleBatch(...),
# })
your_optimize_func(sup, w1, w2, batch) # Custom policy optimization
# Broadcast new weights and repeat
for ev in evaluators:
ev.set_weights.remote({
"supervisor_policy": sup.get_weights(),
"worker_p1": w1.get_weights(),
"worker_p2": w2.get_weights(),
})
In summary, RLlib provides several levels of APIs targeted at progressively more
requirements for customizability. At the highest levels this provides a simple
“out of the box” training process, but you retain the option to piece together
your own algorithms and training strategies from the core multi-agent
abstractions. To get started, here are a couple intermediate level scripts that
can be run directly: multiagent_cartpole.py,
multiagent_two_trainers.py.
Performance
RLlib is designed to scale to large clusters – and this applies to multi-agent
mode as well – but we also apply optimizations such as vectorization for
single-core efficiency. This allows for effective use of the multi-agent APIs on
small machines.
To show the importance of these optimizations, in the below graph we plot
single-core policy evaluation throughout vs the number of agents in the
environment. For this benchmark the observations are small float vectors, and
the policies are small 16×16 fully connected networks. We assign each agent to a
random policy from a pool of 10 such policy networks. RLlib manages over 70k
actions/s/core at 10000 agents per environment (the bottleneck becomes Python
overhead at this point). When vectorization is turned off, experience collection
slows down by 40x:

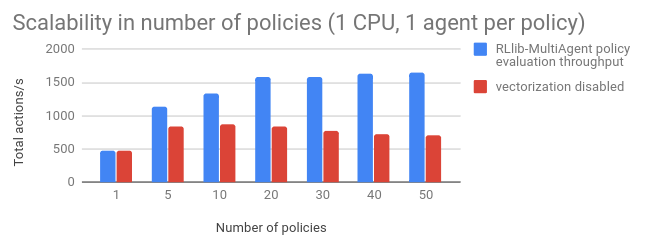
We also evaluate the more challenging case of having many distinct policy
networks used in the environment. Here we can still leverage vectorization to
fuse multiple TensorFlow calls into one, obtaining more stable per-core
performance as the number of distinct policies scales from 1 to 50:
Conclusion
This blog post introduces a fast and general framework for multi-agent
reinforcement learning. We’re currently working with early users of this
framework in BAIR, the Berkeley Flow team, and industry to further
improve RLlib. Try it out with 'pip install ray[rllib]' and tell us about
your own use cases!
Documentation for RLlib and multi-agent support can be found at
https://rllib.io.
Erin Grant, Eric Jang, and Eugene Vinitsky provided helpful input for this blog
post.